OpenCV-python:阈值分割
一、滤波#
滤波是一种卷积操作,常用于图像的预处理。低通滤波器就是允许低频信号通过,在图像中边缘和噪点都相当于高频部分,所以低通滤波器用于去除噪点、平滑和模糊图像。高通滤波器则反之,用来增强图像边缘,进行锐化处理。
- 低通滤波器是模糊
- 高通滤波器是锐化
常见噪声有椒盐噪声 和高斯噪声 ,椒盐噪声可以理解为斑点,随机出现在图像中的黑点或白点;高斯噪声可以理解为拍摄图片时由于光照等原因造成的噪声。
1.1 均值滤波#
均值滤波是一种最简单的滤波处理,它取的是卷积核区域内元素的均值,用cv2.blur()实现,如3×3的卷积核:
$$ kernel_{m} = \frac{1}{9}\left[ \begin{matrix} 1 & 1 & 1 \newline 1 & 1 & 1 \newline 1 & 1 & 1 \end{matrix} \right] $$
img = cv2.imread('lena.jpg')
blur = cv2.blur(img, (3, 3)) # 均值模糊
1.2 方框滤波#
方框滤波跟均值滤波很像,如3×3的滤波核如下:
$$ kernel_{b} = a\left[ \begin{matrix} 1 & 1 & 1 \newline 1 & 1 & 1 \newline 1 & 1 & 1 \end{matrix} \right] $$
用cv2.boxFilter()函数实现,当
# 前面的均值滤波也可以用方框滤波实现
blur = cv2.boxFilter(img, -1, (3, 3), normalize=True)
- 参数2:
ddtype为目标的数据类型,取-1表示和原图相同 - 可选参数
normalize为True的时候,方框滤波就是均值滤波,上式中的a就等于1/9;normalize为False的时候,a=1,相当于求区域内的像素和。
1.3 高斯滤波#
前面两种滤波方式,卷积核内的每个值都一样,也就是说图像区域中每个像素的权重也就一样。高斯滤波的卷积核权重并不相同:中间像素点权重最高,越远离中心的像素权重越小。显然这种处理元素间权值的方式更加合理一些。图像是2维的,所以我们需要使用2维的高斯函数 ,比如OpenCV中默认的3×3的高斯卷积核:
$$ kernel_{g} = \left[ \begin{matrix} 0.0625 & 0.125 & 0.0625 \newline 0.125 & 0.25 & 0.125 \newline 0.0625 & 0.125 & 0.0625 \end{matrix} \right] $$
OpenCV中对应函数为cv2.GaussianBlur(src,ksize,sigmaX):
# 高斯滤波
gaussian = cv2.GaussianBlur(img, (5, 5), 1)
参数3 σx值越大,模糊效果越明显。高斯滤波相比均值滤波效率要慢,但可以有效消除高斯噪声,能保留更多的图像细节,所以经常被称为最有用的滤波器。
1.4 中值滤波#
中值又叫中位数,是所有数排序后取中间的值。中值滤波就是用区域内的中值来代替本像素值,所以那种孤立的斑点,如0或255很容易消除掉,适用于去除椒盐噪声和斑点噪声。中值是一种非线性操作,效率相比前面几种线性滤波要慢。
# 中值滤波
median = cv2.medianBlur(img, 5)
1.5 双边滤波#
模糊操作基本都会损失掉图像细节信息,尤其前面介绍的线性滤波器,图像的边缘信息很难保留下来。然而,边缘(edge)信息是图像中很重要的一个特征,所以这才有了另一种非线性滤波双边滤波。双边滤波在高斯滤波的基础上加入了对灰度信息的权重,即在邻域内,灰度值越接近中心点灰度值的点的权重更大,灰度值相差大的点权重越小。此权重大小,则由值域高斯函数确定。两者权重系数相乘,得到最终的卷积模板。
# 双边滤波
blur = cv2.bilateralFilter(img, 9, 75, 75)
- 参数2:d – Diameter of each pixel neighborhood that is used during filtering. If it is non-positive, it is computed from
sigmaSpace. - 参数3:sigmaColor – Filter sigma in the color space.
- 参数4:sigmaSpace – Filter sigma in the coordinate space.
1.6 padding#
不难发现,前面我们用3×3的核对一副6×6的图像进行卷积,得到的是4×4的图,图片缩小了!那怎么办呢?我们可以把原图扩充一圈,再卷积,这个操作叫填充padding。
上面的滤波函数都有一个可选参数borderType用来输入padding类型。
BORDER_CONSTANT
iiiiii|abcdefgh|iiiiiiiwith some specifiedi
BORDER_REPLICATEaaaaaa|abcdefgh|hhhhhhh
BORDER_REFLECTfedcba|abcdefgh|hgfedcb
BORDER_WRAPcdefgh|abcdefgh|abcdefg
BORDER_REFLECT_101gfedcb|abcdefgh|gfedcba
BORDER_TRANSPARENTuvwxyz|absdefgh|ijklmno
BORDER_REFLECT101 same as BORDER_REFLECT_101
BORDER_DEFAULT same as BORDER_REFLECT_101
BORDER_ISOLATED do not look outside of ROI
1.7 滤波总结#
- 在不知道用什么滤波器好的时候,优先高斯滤波
cv2.GaussianBlur(),然后均值滤波cv2.blur()。 - 斑点和椒盐噪声优先使用中值滤波
cv2.medianBlur()。 - 要去除噪点的同时尽可能保留更多的边缘信息,使用双边滤波
cv2.bilateralFilter()。 - 线性滤波方式:均值滤波、方框滤波、高斯滤波(速度相对快)。
- 非线性滤波方式:中值滤波、双边滤波(速度相对慢)。
二、阈值分割#
2.1 固定阈值分割#
固定阈值分割很直接,像素点值大于阈值变成一类值,小于阈值变成另一类值。
# 阈值分割
ret, th = cv2.threshold(img, 127, 255, cv2.THRESH_BINARY)
cv2.threshold()用来实现阈值分割,ret是return value缩写,代表当前的阈值,暂时不用理会。函数有4个参数:
- 参数1:要处理的原图,一般是灰度图
- 参数2:设定的阈值
- 参数3:最大阈值,一般为255
- 参数4:阈值的方式,主要有5种,详情:ThresholdTypes
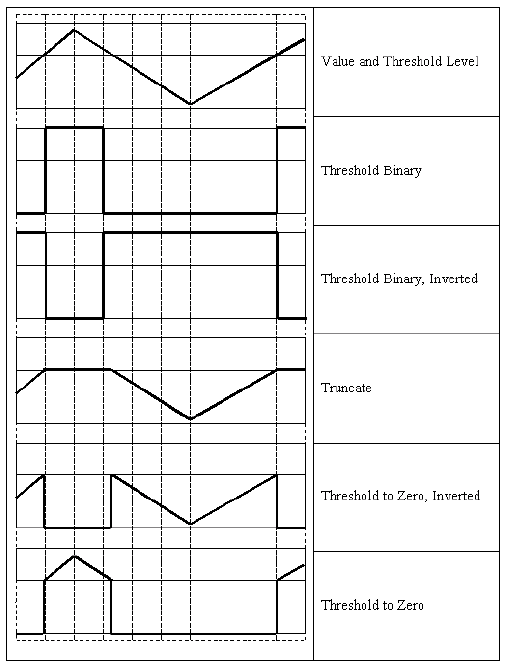
最常见的就是前两种,相当于二值化。
2.2 自适应阈值#
看得出来固定阈值是在整幅图片上应用一个阈值进行分割,它并不适用于明暗分布不均的图片。 cv2.adaptiveThreshold()自适应阈值会每次取图片的一小部分计算阈值,这样图片不同区域的阈值就不尽相同。
import matplotlib.pyplot as plt
import cv2
# 自适应阈值对比固定阈值
img = cv2.imread('img_name.jpg', 0)
# 固定阈值
ret, th1 = cv2.threshold(img, 127, 255, cv2.THRESH_BINARY)
# 自适应阈值
th2 = cv2.adaptiveThreshold(
img, 255, cv2.ADAPTIVE_THRESH_MEAN_C, cv2.THRESH_BINARY, 11, 4)
th3 = cv2.adaptiveThreshold(
img, 255, cv2.ADAPTIVE_THRESH_GAUSSIAN_C, cv2.THRESH_BINARY, 17, 6)
titles = ['Original', 'Global(v = 127)', 'Adaptive Mean', 'Adaptive Gaussian']
images = [img, th1, th2, th3]
for i in range(4):
plt.subplot(2, 2, i + 1), plt.imshow(images[i], 'gray')
plt.title(titles[i], fontsize=8)
plt.xticks([]), plt.yticks([])
plt.show()
- 参数1:要处理的原图
- 参数2:最大阈值,一般为255
- 参数3:小区域阈值的计算方式
ADAPTIVE_THRESH_MEAN_C:小区域内取均值ADAPTIVE_THRESH_GAUSSIAN_C:小区域内加权求和,权重是个高斯核
- 参数4:阈值方式(跟前面讲的那5种相同)
- 参数5:小区域的面积,如11就是11*11的小块
- 参数6:最终阈值等于小区域计算出的阈值再减去此值
2.3 Otsu阈值法#
# 先进行高斯滤波,再使用Otsu阈值法
blur = cv2.GaussianBlur(img, (5, 5), 0)
ret3, th3 = cv2.threshold(blur, 0, 255, cv2.THRESH_BINARY + cv2.THRESH_OTSU)
$$ g=\omega_0\omega_1(\mu_0-\mu_1)^2 $$
g 就是前景与背景两类之间的方差,这个值越大,说明前景和背景的差别也就越大,效果越好。Otsu算法便是遍历阈值T,使得 g 最大,所以又称为最大类间方差法。基本上双峰图片的阈值T在两峰之间的谷底。原文地址
2.4 背景差分#
背景差分(Background Subtraction, BS)是通过使用静态相机来生成前景蒙版(即包含属于场景中的移动对象的像素的二进制图像)的通用且广泛使用的技术。 顾名思义,BS是在当前帧和背景模型之间执行减法运算,其中场景的静态部分,或者可视为背景的所有内容将被减去,移动对象将会被提取出来。如下图所示。
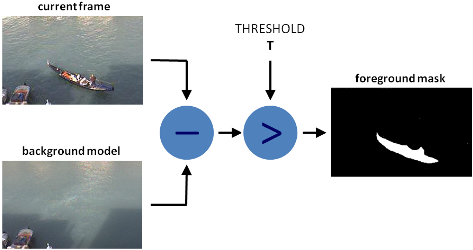
后台建模包括两个主要步骤:
- 背景初始化
- 当前帧更新
官方给出了下面的例子:
from __future__ import print_function
import cv2 as cv
import argparse
parser = argparse.ArgumentParser(description='This program shows how to use background subtraction methods provided by OpenCV. You can process both videos and images.')
parser.add_argument('--input', type=str, help='Path to a video or a sequence of image.', default='Video_name.mp4') # 输入视频路径
parser.add_argument('--algo', type=str, help='Background subtraction method (KNN, MOG2).', default='KNN') # 输入差分方法: KNN or MOG2
args = parser.parse_args()
## [create]
#create Background Subtractor objects
if args.algo == 'MOG2':
backSub = cv.createBackgroundSubtractorMOG2()
else:
backSub = cv.createBackgroundSubtractorKNN()
## [create]
## [capture]
capture = cv.VideoCapture(cv.samples.findFileOrKeep(args.input))
if not capture.isOpened:
print('Unable to open: ' + args.input)
exit(0)
## [capture]
while True:
ret, frame = capture.read()
if frame is None:
break
## [apply]
#update the background model
fgMask = backSub.apply(frame)
## [apply]
## [display_frame_number]
#get the frame number and write it on the current frame
cv.rectangle(frame, (10, 2), (100,20), (255,255,255), -1)
cv.putText(frame, str(capture.get(cv.CAP_PROP_POS_FRAMES)), (15, 15),
cv.FONT_HERSHEY_SIMPLEX, 0.5 , (0,0,0))
## [display_frame_number]
## [show]
#show the current frame and the fg masks
cv.imshow('Frame', frame)
cv.imshow('FG Mask', fgMask)
## [show]
keyboard = cv.waitKey(30)
if keyboard == ord('q') or keyboard == 27:
break
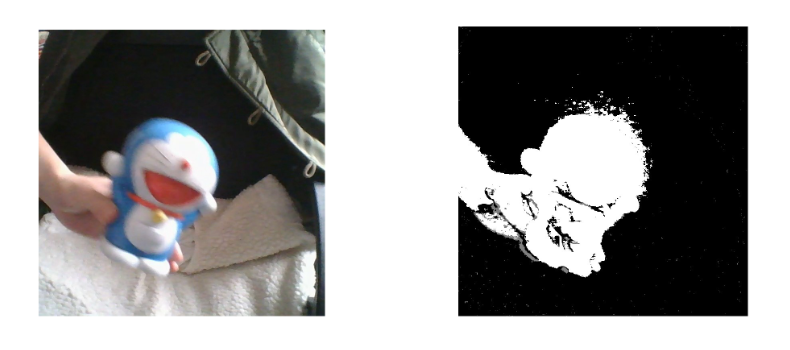
关于KNN,MOG2,GMG的区别之后再补充。移动的哆啦A梦如图